PCプラットフォームによる
PCプラットフォームによる
産業用ソリューションプロバイダー
産業用ソリューションプロバイダー
採用情報
お問合せ
Japanese
English
PP372
サイト内検索:
製品情報
サービス
企業案内
セミナー / 展示会
カタログ
YouTube
技術コラム
サイトマップ
ホーム
>
EtherCAT®製品&サービス
>
EtherCAT®センター
> 実用例
実用例:モーター位置制御装置
◦512軸リアルタイムモーター位置決め制御
利用ソリューション:
概要
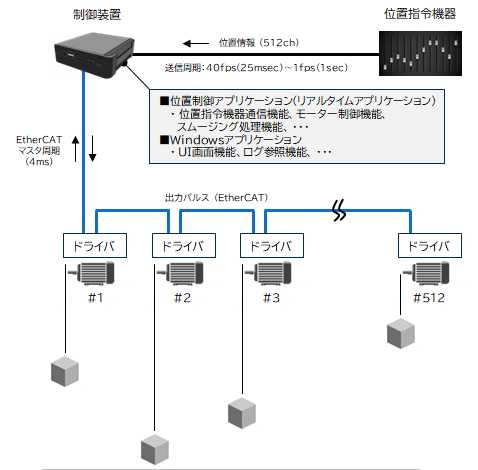
位置指令機器から位置情報の周期データに基づいて、最大512台のステッピングモーターを制御します。制御装置でモーターの現在位置と目的位置からフィルタリング(スムージング処理)することで、モーターの加減速を制御して、モーターに吊るされた物体を高速かつ滑らかに上下動させます。
システムの仕組み
制御装置は位置指令機器から定周期(25ms~1sec)に送られてくる位置情報をサンプリングします。
サンプリングした位置情報はフィルタリング(スムージング処理)を行い、モーターの目的位置としてEtherCATスレーブへ出力します。
EtherCATスレーブに出力された位置情報は4ms周期にステッピングモーターのパルス位置情報と同期され、モーターは同期の周期で目的の位置へ移動します。
制御装置スペック
■ハードウェア
1)CPU
: Intel Core i7-10700T 2.0GHz
2)メモリ
: 8GB
3)ストレージ
: 256GB (SSD)
4)NIC
: Intel I219V
■ソフトウェア
1)Windows
: Windows10 IoT
2)INtime
: 6.4.23337.1
3)EtherCAT
: RSI-ECAT-Master/RED
関連リンク
EtherCAT総合窓口
EtherCATマスタ
貸出しサービス
EtherCAT設定ツール
KPA EtherCAT Studio
INtime用EtherCATマスタ
RSI-ECAT
Windows用EtherCATマスタ
RSW-ECAT
最新トピックス
コンフィグレーション不要
ENI作成サービス


 概要
概要