□■□■□■□■□■□■□■□ COFFEE BREAK □■□■□■□■□■□■□■□
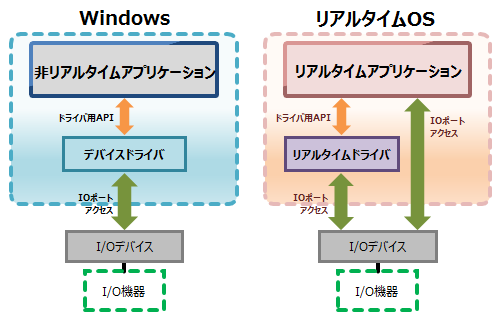
IOポート操作関数を利用すると、RS-232C等のシリアル通信で使用するCOMポートでもデジタル入出力ができます。
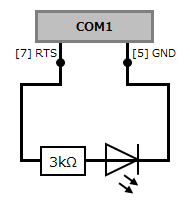
COM1のRTS信号を使用して
LEDを1秒周期で5回点滅させる
|
■ INtime®アプリケーションのソースコード例
#include <rt.h>
#define IO_BASE 0x03F8 // IOポートのベースアドレス
#define MCR 0x0004 // モデムコントロールレジスタのオフセット
#define RTS 0x02 // RTSピンの状態設定ビット(0:OFF 1:ON)
void main(int argc, char* argv[])
{
int i;
BYTE val = inbyte(IO_BASE + MCR); // 現在の状態取得
for(i=0; i<10; i++)
{
RtSleep(500);
if(i % 2) outbyte(IO_BASE + MCR, val & ~RTS); // 消灯
else outbyte(IO_BASE + MCR, val | RTS); // 点灯
}
}
|
□■□■□■□■□■□■□■□■□■□■□■□■□■□■□■□■□■□■□■□